Kyaw Linn Khant
Embodied AI & Robotics Engineer · Edge Autonomy · Sim2Real
Embodied AI & Robotics Engineer · Edge Autonomy · Sim2Real
I'm Kyaw Linn Khant — an Embodied AI & Robotics Engineer with a BEng (Hons) in Robotics and Artificial Intelligence from the University of Hertfordshire. I build systems that sit at the intersection of embodied intelligence and real-world deployment — from Sim2Real RL policies running on microcontrollers to autonomous agents managing Kubernetes clusters.
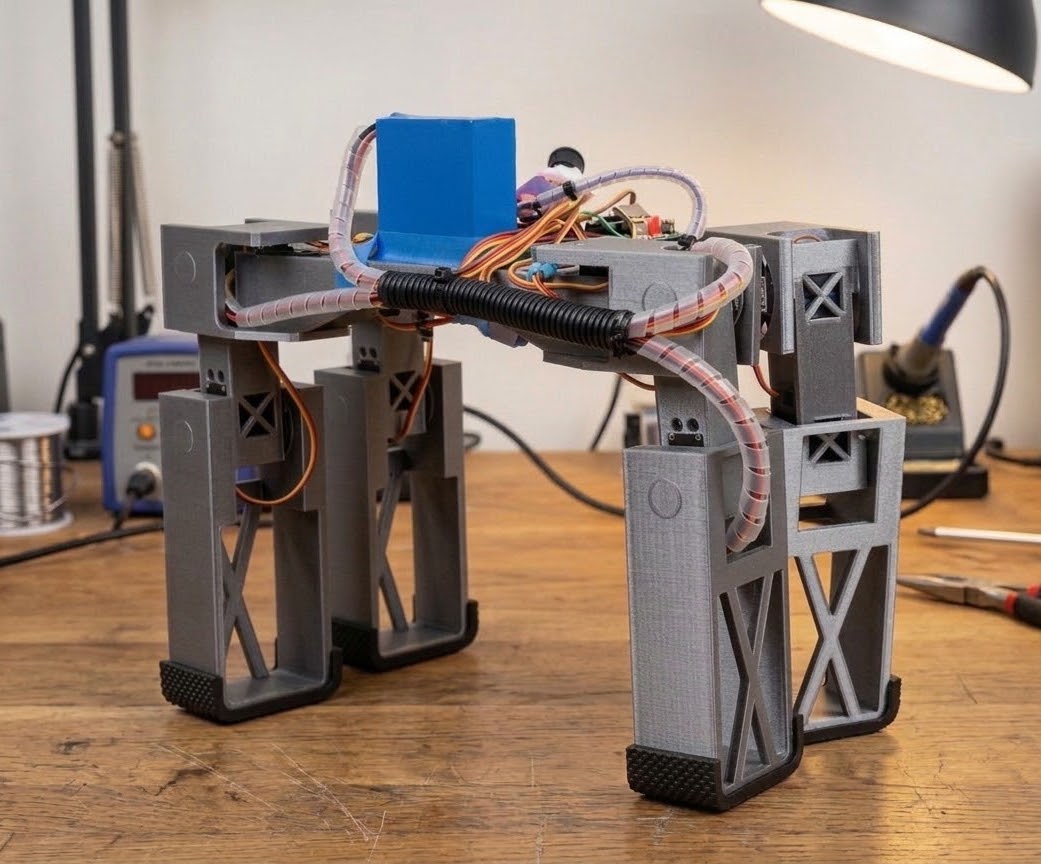
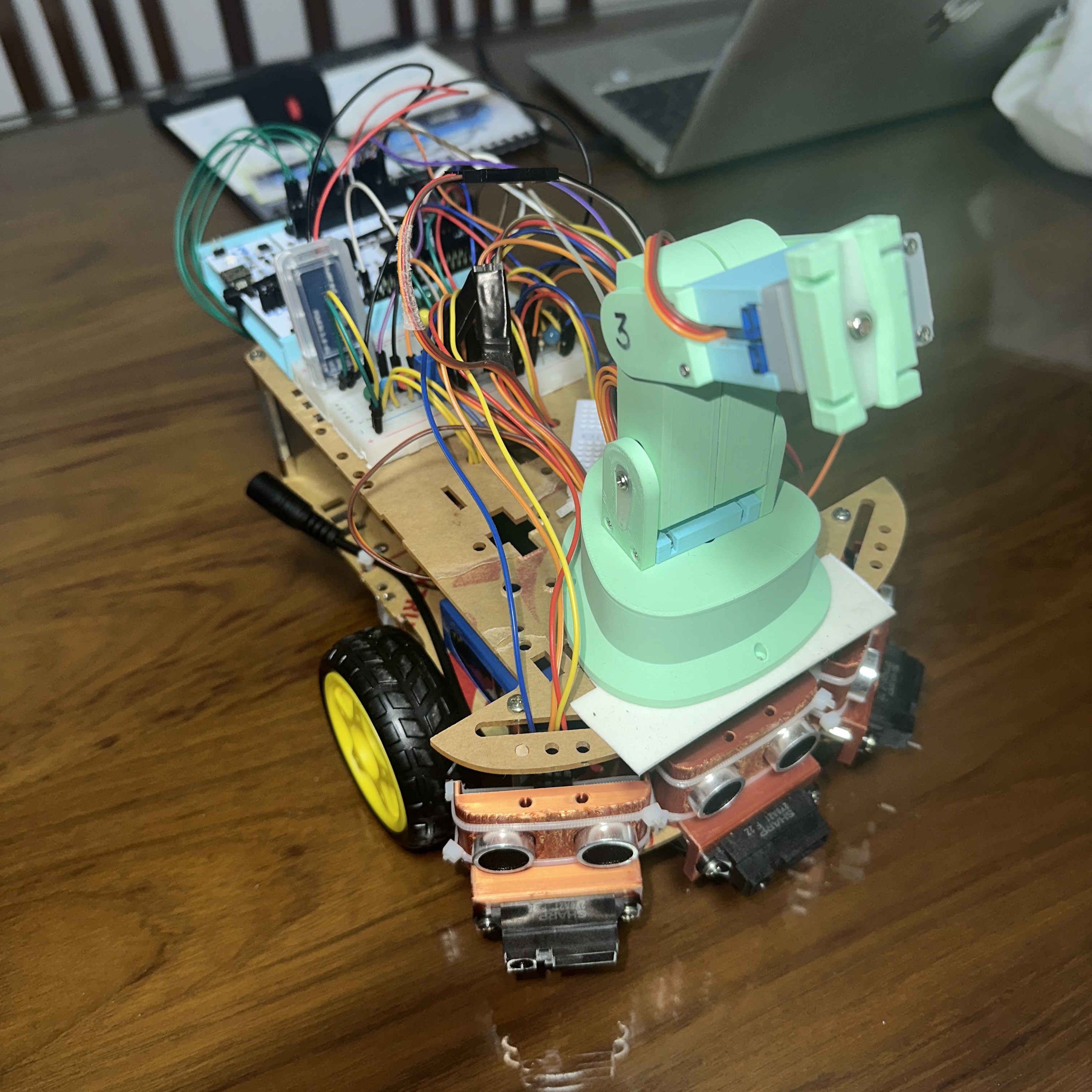
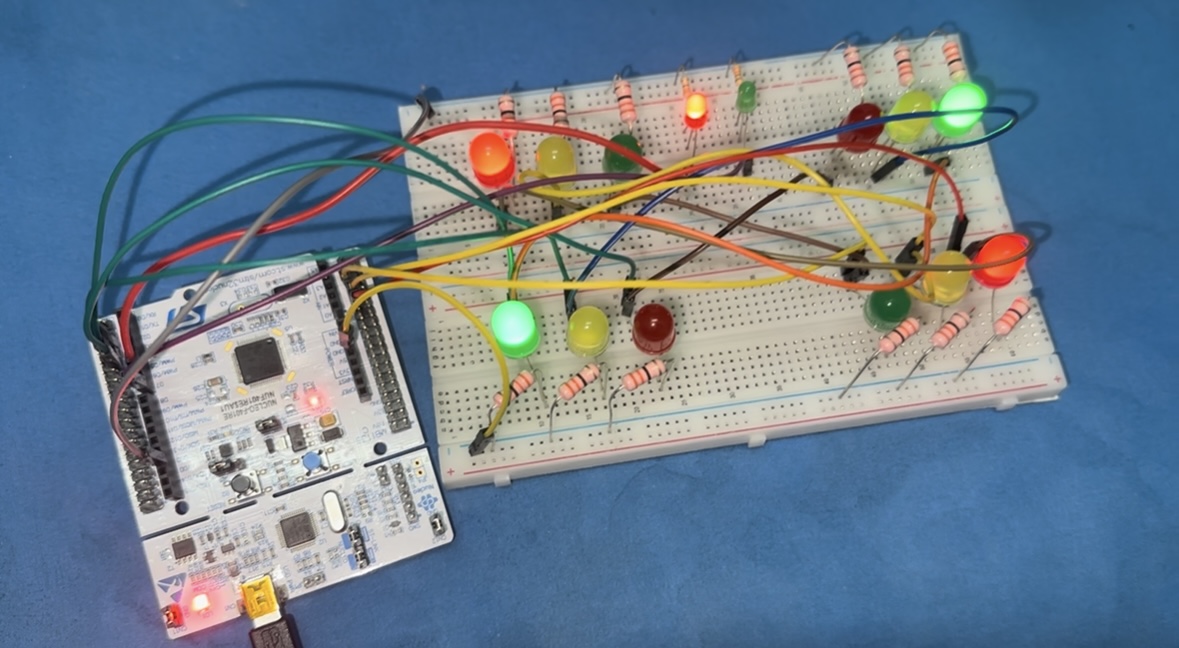
My work spans the full stack: training RL and ML models, deploying them at the edge with TFLite and TensorRT, integrating LiDAR SLAM and sensor fusion pipelines in ROS2, and building LLM-powered agentic systems with LangChain, LangGraph, and RAG. I care about systems that actually work outside the lab.
I've built and shipped end-to-end systems across Singapore — spanning embodied AI, robotics prototyping, and embedded systems — taking projects from concept to working hardware.